

|
| MOQ: | 1 |
| 価格: | US $3500.00 - 4880.00/ Set |
| 標準パッケージ: | 段ボール箱・木箱 |
| 配達期間: | 6~8週間 |
| 支払方法: | T/T |
| 供給能力: | 年間500セット |
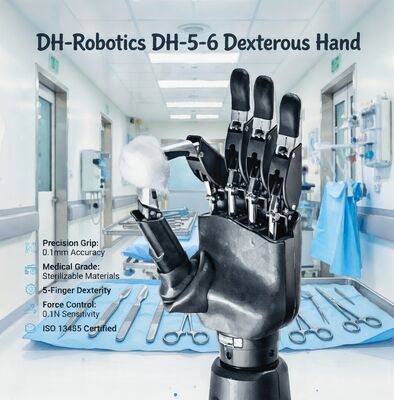
DH-ロボティクス社のDH-5-6は 5本の指で 6つのアクティブなDOFを持つ手巧いロボット手で,ヒューマノイドロボット,コラボレーションアプリケーション,研究のために設計されています.マイクロ線形アクチュエータで動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動この製品はコスト効率を重視し 人間のような巧みに 優れています
| パラメータ | 仕様 |
|---|---|
| 指 | 5本の指 (人間型) |
| アクティブ DOF | 6 |
| 合計関節 | 12 |
| アクチュエーション | 動脈駆動式 (マイクロ線形アクチュエータ) |
| 感知 | フォース/触覚センサー |
| 制御モード | 位置力混合 |
| コミュニケーション | CAN/RS485/EtherCAT |
| 体重 | 約400~550g |
| 握力 (指あたり) | 典型的な515 N |
メールを送ってください.
|
|
| MOQ: | 1 |
| 価格: | US $3500.00 - 4880.00/ Set |
| 標準パッケージ: | 段ボール箱・木箱 |
| 配達期間: | 6~8週間 |
| 支払方法: | T/T |
| 供給能力: | 年間500セット |
DH-ロボティクス社のDH-5-6は 5本の指で 6つのアクティブなDOFを持つ手巧いロボット手で,ヒューマノイドロボット,コラボレーションアプリケーション,研究のために設計されています.マイクロ線形アクチュエータで動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動動この製品はコスト効率を重視し 人間のような巧みに 優れています
| パラメータ | 仕様 |
|---|---|
| 指 | 5本の指 (人間型) |
| アクティブ DOF | 6 |
| 合計関節 | 12 |
| アクチュエーション | 動脈駆動式 (マイクロ線形アクチュエータ) |
| 感知 | フォース/触覚センサー |
| 制御モード | 位置力混合 |
| コミュニケーション | CAN/RS485/EtherCAT |
| 体重 | 約400~550g |
| 握力 (指あたり) | 典型的な515 N |
メールを送ってください.

