|
|
| MOQ: | 1 |
| 価格: | 1500$ |
| 標準パッケージ: | 169cm(高さ)、75cm(幅)、30cm(長さ) |
| 配達期間: | 1ヶ月 |
| 供給能力: | 99台 |
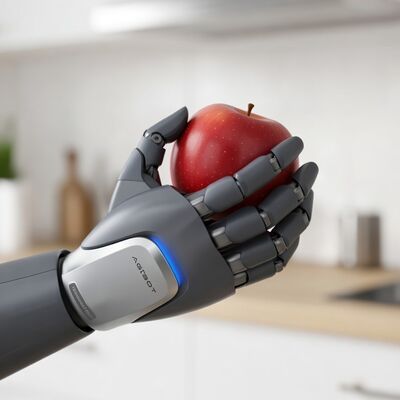
New AGIBOT OmniHand Pro 2025 Five-Finger Humanoid Robot Handは、人間の手の動きを精密かつ柔軟に模倣するように設計された高度なロボットエンドエフェクタです。この五本指ロボットハンドは、協調的な指の動き、高精度な把持、および複雑な操作タスクのためのインテリジェントな力フィードバックをサポートしています。
OmniHand Pro 2025は、自然な手の動き、適応的な物体操作、および安全な人間とロボットのインタラクションを必要とする、人型ロボット、サービスロボット、研究プラットフォーム、および産業用ロボットアームに適しています。
各指は独立して動き、人間の手の動きと同様に、自然な把持と操作を実行できます。
統合された力と触覚センサーにより、物体の形状、重量、および脆弱性に基づいて、適応的なグリップ制御が可能になります。
複数の関節のスムーズで正確な制御により、繊細な取り扱いと複雑な操作タスクがサポートされます。
高度なデジタル制御アルゴリズムにより、応答性の高い動きと、安定した動作のためのリアルタイム調整が可能になります。
標準的な通信および取り付けインターフェースを介して、人型ロボット、ロボットアーム、およびサービスロボットとの統合をサポートします。
柔軟な構成オプションにより、特定のタスクやロボットシステムに合わせてカスタマイズできます。
| 項目 | 仕様 |
|---|---|
| 製品タイプ | 五本指人型ロボットハンド |
| 自由度 | マルチジョイント独立指 |
| 制御方法 | インテリジェントデジタル制御 |
| センシング | 力と触覚フィードバック |
| 互換性 | 人型ロボットおよびロボットアーム |
| 通信 | 標準的なロボットインターフェース |
| 統合 | モジュール式取り付けと制御 |
| 電源 | 外部システム電源 |
| 動作環境 | 屋内、産業、研究スペース |
仕様は構成によって異なる場合があります。
AGIBOT OmniHand Pro 2025は、人間の手のような機械的設計とインテリジェントなセンシングおよび制御を組み合わせ、次世代の人型ロボットおよび高度なロボットプラットフォームをサポートします。高度な操作性と、将来のアプリケーションのための柔軟性の向上を実現します。
高度な操作とロボット工学における人間の手のような動きのために設計された、五本指の人型ロボットハンドです。
はい。標準インターフェースを使用して、人型ロボット、ロボットアーム、およびサービスロボットとの統合をサポートしています。
把持、取り扱い、物体の操作、および精度と適応制御を必要とする繊細なタスクを実行できます。
はい。統合された力と触覚センサーにより、接触フィードバックに基づいて適応的なグリップ制御が可能になります。
はい。高度な操作研究のために、AIロボット工学の研究室や教育環境で広く使用されています。
はい。そのモジュール設計により、さまざまなアプリケーションとシステム要件に合わせてカスタマイズできます。
|
|
| MOQ: | 1 |
| 価格: | 1500$ |
| 標準パッケージ: | 169cm(高さ)、75cm(幅)、30cm(長さ) |
| 配達期間: | 1ヶ月 |
| 供給能力: | 99台 |
New AGIBOT OmniHand Pro 2025 Five-Finger Humanoid Robot Handは、人間の手の動きを精密かつ柔軟に模倣するように設計された高度なロボットエンドエフェクタです。この五本指ロボットハンドは、協調的な指の動き、高精度な把持、および複雑な操作タスクのためのインテリジェントな力フィードバックをサポートしています。
OmniHand Pro 2025は、自然な手の動き、適応的な物体操作、および安全な人間とロボットのインタラクションを必要とする、人型ロボット、サービスロボット、研究プラットフォーム、および産業用ロボットアームに適しています。
各指は独立して動き、人間の手の動きと同様に、自然な把持と操作を実行できます。
統合された力と触覚センサーにより、物体の形状、重量、および脆弱性に基づいて、適応的なグリップ制御が可能になります。
複数の関節のスムーズで正確な制御により、繊細な取り扱いと複雑な操作タスクがサポートされます。
高度なデジタル制御アルゴリズムにより、応答性の高い動きと、安定した動作のためのリアルタイム調整が可能になります。
標準的な通信および取り付けインターフェースを介して、人型ロボット、ロボットアーム、およびサービスロボットとの統合をサポートします。
柔軟な構成オプションにより、特定のタスクやロボットシステムに合わせてカスタマイズできます。
| 項目 | 仕様 |
|---|---|
| 製品タイプ | 五本指人型ロボットハンド |
| 自由度 | マルチジョイント独立指 |
| 制御方法 | インテリジェントデジタル制御 |
| センシング | 力と触覚フィードバック |
| 互換性 | 人型ロボットおよびロボットアーム |
| 通信 | 標準的なロボットインターフェース |
| 統合 | モジュール式取り付けと制御 |
| 電源 | 外部システム電源 |
| 動作環境 | 屋内、産業、研究スペース |
仕様は構成によって異なる場合があります。
AGIBOT OmniHand Pro 2025は、人間の手のような機械的設計とインテリジェントなセンシングおよび制御を組み合わせ、次世代の人型ロボットおよび高度なロボットプラットフォームをサポートします。高度な操作性と、将来のアプリケーションのための柔軟性の向上を実現します。
高度な操作とロボット工学における人間の手のような動きのために設計された、五本指の人型ロボットハンドです。
はい。標準インターフェースを使用して、人型ロボット、ロボットアーム、およびサービスロボットとの統合をサポートしています。
把持、取り扱い、物体の操作、および精度と適応制御を必要とする繊細なタスクを実行できます。
はい。統合された力と触覚センサーにより、接触フィードバックに基づいて適応的なグリップ制御が可能になります。
はい。高度な操作研究のために、AIロボット工学の研究室や教育環境で広く使用されています。
はい。そのモジュール設計により、さまざまなアプリケーションとシステム要件に合わせてカスタマイズできます。