|
|
| MOQ: | 1 |
| 価格: | US $2500.00 - 3000.00/ Set |
| 標準パッケージ: | プラスチックボックス + フォーム |
| 配達期間: | 6~8週間 |
| 支払方法: | T/T |
| 供給能力: | 1年ごとの1800セット |
製品概要
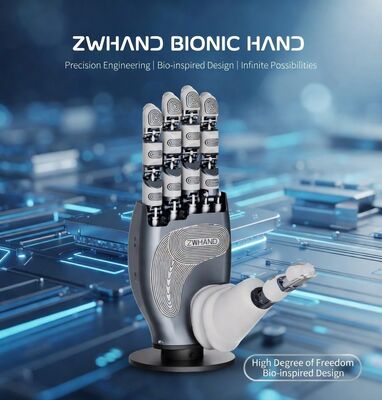
ZWHANDデクステルスハンド (ZWHAND dexterous hand) は,兆威機電 (兆威機電) が開発した5指の動脈駆動ロボットハンドである. 6?? 8アクティブDOF,統合フォースセンシング,ハイブリッド制御が搭載されており,ヒューマノイドロボットハンドを標的にしている.研究ラボと教育プラットフォームこの製品は国内サプライチェーンの優位性のあるコスト効率の良い操作に重点を置いています
テクニカル仕様
| パラメータ | 仕様 |
|---|---|
| 指 | 5本の指 (人間型) |
| アクティブ DOF | 6・8 |
| 合計関節 | 12・15 |
| 駆動方法 | 微細線形アクチュエータを搭載した動脈駆動装置 |
| 感知 | フォース/触覚フィードバック |
| 制御モード | ハイブリッド位置+力 |
| コミュニケーション | CAN/RS485/EtherCAT |
| 体重 | ~400~600g |
| 指を握る力 | 5 〜 15 N (典型) |
応用産業
一般 的 な 問題 と 解決策
代替モデル
わたしたち から 買う の は なぜ か
ストックと配達時間
RFQ フォームメールを送ってください.
|
|
| MOQ: | 1 |
| 価格: | US $2500.00 - 3000.00/ Set |
| 標準パッケージ: | プラスチックボックス + フォーム |
| 配達期間: | 6~8週間 |
| 支払方法: | T/T |
| 供給能力: | 1年ごとの1800セット |
製品概要
ZWHANDデクステルスハンド (ZWHAND dexterous hand) は,兆威機電 (兆威機電) が開発した5指の動脈駆動ロボットハンドである. 6?? 8アクティブDOF,統合フォースセンシング,ハイブリッド制御が搭載されており,ヒューマノイドロボットハンドを標的にしている.研究ラボと教育プラットフォームこの製品は国内サプライチェーンの優位性のあるコスト効率の良い操作に重点を置いています
テクニカル仕様
| パラメータ | 仕様 |
|---|---|
| 指 | 5本の指 (人間型) |
| アクティブ DOF | 6・8 |
| 合計関節 | 12・15 |
| 駆動方法 | 微細線形アクチュエータを搭載した動脈駆動装置 |
| 感知 | フォース/触覚フィードバック |
| 制御モード | ハイブリッド位置+力 |
| コミュニケーション | CAN/RS485/EtherCAT |
| 体重 | ~400~600g |
| 指を握る力 | 5 〜 15 N (典型) |
応用産業
一般 的 な 問題 と 解決策
代替モデル
わたしたち から 買う の は なぜ か
ストックと配達時間
RFQ フォームメールを送ってください.