|
|
| MOQ: | 1 |
| 価格: | 89999~129999USD |
| 支払方法: | T/T |
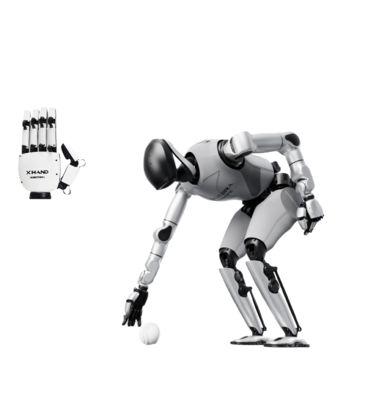
のROBOTERA L7 人型ロボット XHAND1 器用な手これは、高性能の全身動作制御と精密な手先の器用さを組み合わせた、高度なヒューマノイド ロボット工学の画期的な進歩を表しています。
を搭載ロボテラ XHAND1、複雑な操作が可能な 5 本指の器用なロボット ハンド、この構成により、L7 は高度に調整されたタスクを実行でき、研究、自動化、およびサービス アプリケーションで人間の手の動きを厳密に再現できます。
のために作られたAI学習、産業オートメーション、ロボティクスの研究開発ROBOTERA L7 + XHAND1 システムは、動作、知覚、知能のシームレスな統合を提供し、現在入手可能な最も高度なヒューマノイド ロボット プラットフォームの 1 つとなっています。
| パラメータ | 仕様 |
|---|---|
| モデル | XHAND1 |
| タイプ | 5本指の器用なロボットハンド |
| 自由度 | 合計17個 |
| 作動 | フォースフィードバック付き電動マイクロサーボモーター |
| グリップ力 | 指あたり最大 20 N |
| センサーフィードバック | 位置、トルク、触覚センサー |
| 材料 | 軽量アルミニウム合金とポリマー複合材 |
| コミュニケーション | CAN/EtherCATインターフェース |
| 電源 | DC24V |
| 制御モード | 位置・トルク・インピーダンス制御 |
| 互換性のあるシステム | ROBOTERA L7 人型ロボットとモジュール式プラットフォーム |
| パラメータ | 仕様 |
|---|---|
| モデル | ロボテラL7 |
| 身長 | 1.75メートル |
| 重さ | 68kg |
| 自由度 | 28 |
| 歩く速度 | 最大5km/h |
| バッテリー寿命 | 1.5~2時間 |
| ソフトウェア | ROS2 / Python / C++ |
| 接続性 | Wi-Fi / イーサネット / 5G |
| センサー | ビジョン、IMU、トルク、LiDAR、触覚センサー |
連絡先メールアドレス: edwardzhao@gbsxj.com
電話/WhatsApp:+86-15000725058
|
|
| MOQ: | 1 |
| 価格: | 89999~129999USD |
| 支払方法: | T/T |
のROBOTERA L7 人型ロボット XHAND1 器用な手これは、高性能の全身動作制御と精密な手先の器用さを組み合わせた、高度なヒューマノイド ロボット工学の画期的な進歩を表しています。
を搭載ロボテラ XHAND1、複雑な操作が可能な 5 本指の器用なロボット ハンド、この構成により、L7 は高度に調整されたタスクを実行でき、研究、自動化、およびサービス アプリケーションで人間の手の動きを厳密に再現できます。
のために作られたAI学習、産業オートメーション、ロボティクスの研究開発ROBOTERA L7 + XHAND1 システムは、動作、知覚、知能のシームレスな統合を提供し、現在入手可能な最も高度なヒューマノイド ロボット プラットフォームの 1 つとなっています。
| パラメータ | 仕様 |
|---|---|
| モデル | XHAND1 |
| タイプ | 5本指の器用なロボットハンド |
| 自由度 | 合計17個 |
| 作動 | フォースフィードバック付き電動マイクロサーボモーター |
| グリップ力 | 指あたり最大 20 N |
| センサーフィードバック | 位置、トルク、触覚センサー |
| 材料 | 軽量アルミニウム合金とポリマー複合材 |
| コミュニケーション | CAN/EtherCATインターフェース |
| 電源 | DC24V |
| 制御モード | 位置・トルク・インピーダンス制御 |
| 互換性のあるシステム | ROBOTERA L7 人型ロボットとモジュール式プラットフォーム |
| パラメータ | 仕様 |
|---|---|
| モデル | ロボテラL7 |
| 身長 | 1.75メートル |
| 重さ | 68kg |
| 自由度 | 28 |
| 歩く速度 | 最大5km/h |
| バッテリー寿命 | 1.5~2時間 |
| ソフトウェア | ROS2 / Python / C++ |
| 接続性 | Wi-Fi / イーサネット / 5G |
| センサー | ビジョン、IMU、トルク、LiDAR、触覚センサー |
連絡先メールアドレス: edwardzhao@gbsxj.com
電話/WhatsApp:+86-15000725058