|
|
| MOQ: | 1 |
| 価格: | US $2500.00 - 3000.00/ Set |
| 標準パッケージ: | プラスチックボックス + フォーム |
| 配達期間: | 6~8週間 |
| 支払方法: | T/T |
| 供給能力: | 1年ごとの1800セット |
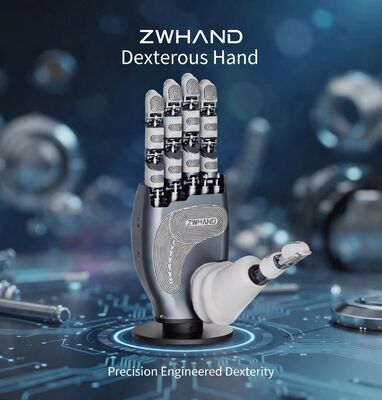
ZWHANDは、5本指の腱駆動による器用なロボットハンドです。ヒューマノイドロボットハンド、協働ロボットのエンドエフェクタ、研究室、教育プラットフォーム向けのコスト効率の高い中国製ソリューションです。マイクロリニアアクチュエータと腱駆動を採用し、フォース/ポジション制御を統合して人間のような把持を実現します。
| パラメータ | 仕様 |
|---|---|
| 指 | 5本指(擬人化レイアウト) |
| アクティブ自由度 | 6~8(モデル依存) |
| 総関節数 | 12~15(標準) |
| 駆動システム | マイクロリニアアクチュエータによる腱駆動 |
| センシング | フォース/触覚センサー |
| 制御モード | ポジション+フォースハイブリッド制御 |
| 通信 | CAN / RS485 / EtherCAT |
| 重量 | 約400~600g |
| 指の把持力 | 指あたり5~15N(標準範囲) |
以下をご提供ください:
|
|
| MOQ: | 1 |
| 価格: | US $2500.00 - 3000.00/ Set |
| 標準パッケージ: | プラスチックボックス + フォーム |
| 配達期間: | 6~8週間 |
| 支払方法: | T/T |
| 供給能力: | 1年ごとの1800セット |
ZWHANDは、5本指の腱駆動による器用なロボットハンドです。ヒューマノイドロボットハンド、協働ロボットのエンドエフェクタ、研究室、教育プラットフォーム向けのコスト効率の高い中国製ソリューションです。マイクロリニアアクチュエータと腱駆動を採用し、フォース/ポジション制御を統合して人間のような把持を実現します。
| パラメータ | 仕様 |
|---|---|
| 指 | 5本指(擬人化レイアウト) |
| アクティブ自由度 | 6~8(モデル依存) |
| 総関節数 | 12~15(標準) |
| 駆動システム | マイクロリニアアクチュエータによる腱駆動 |
| センシング | フォース/触覚センサー |
| 制御モード | ポジション+フォースハイブリッド制御 |
| 通信 | CAN / RS485 / EtherCAT |
| 重量 | 約400~600g |
| 指の把持力 | 指あたり5~15N(標準範囲) |
以下をご提供ください: